卜艳玲
![]()
开通时间:..
最后更新时间:..
主要研究方向包括物联网、普适计算、移动计算、智能感知等,大白话就是:使用IMU、RFID、超声波、毫米波等感知手段实现定位追踪、人机交互等方面的智能应用),主要工作介绍如下。
代表性工作1:基于RFID的运动追踪及触摸识别复合人机交互技术
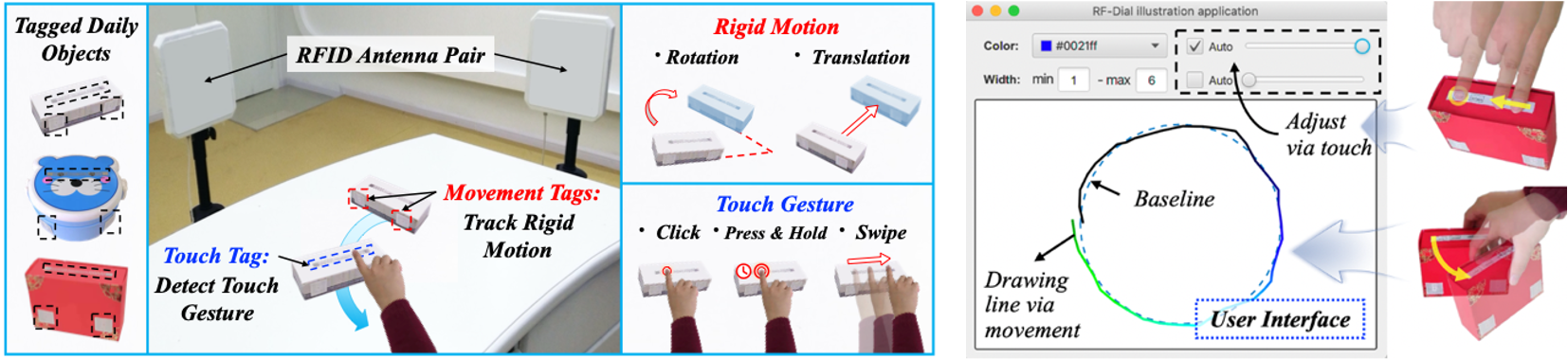
由于射频信号易受环境干扰,如何利用RFID技术实现环境无关的精细感知是关键挑战。对此,我们以人机交互为应用切入点,提供了一种功能丰富、性能鲁棒的精细感知解决方案。具体而言,我们提出了“基于标签阵列的运动分解”解决思路,通过在物体侧面部署拓扑固定的标签阵列,能够利用标签信号之间的相对变化来精确推导目标在空间中的微小姿态变化;进而提出了“基于电感耦合的信号差分”解决思路,通过在物体顶部部署单个标签,能够利用单标签反射信号在时间上的相对变化来精确感知手指在标签上的触摸位置。由此,我们实现了将普通日常物品转为智能交互设备,提供了“双莲并蒂”的复合交互模式。相应成果在CCF-A类会议IEEE INFOCOM和CCF-A类期刊IEEE TMC上发表。
代表性工作2:基于RFID的物品堆放重建技术
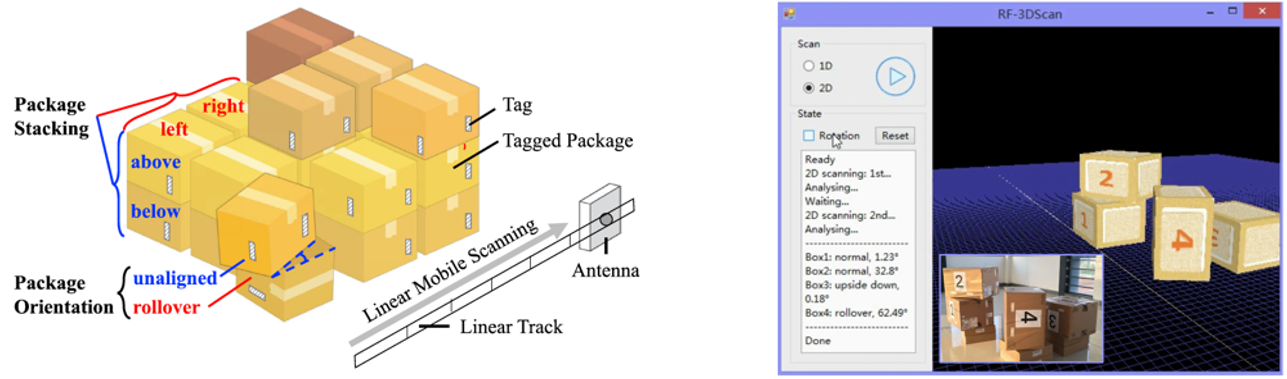
物流业利用三维重建技术来监控仓库内的物品堆放,传统方案主要基于计算机视觉技术或者传感器技术,分别存在视角盲区和电池容量有限的内在缺陷。对此,我们提出了一种基于RFID的物品堆放姿态重建解决方案。具体而言,我们提出了“基于标签阵列的相对定位”解决思路,通过天线线性扫描来采集信号,从而构建到达角轮廓以推算物品朝向;进而提出了“基于空间分割的二维扫描”和“基于标签定位的一维扫描”两种方案来推断多物品的相对位置,一维方案容易部署,而二维方案精度更高。由此,我们实现了物品堆叠状态的自动监控,提供了“一扫便知有没有”的仓储安全监控模式。相应成果在CCF-A类期刊IEEE TMC和CCF-B类会议IEEE SECON上发表。
代表性工作3:基于惯性传感器(IMU)的毫米级书写轨迹还原技术

基于笔的书写是常见的人机交互方式,传统的数字笔产品通常要求用户在触摸屏等特定设备上书写或者限定用户的书写习惯。对此,我们提出了一种基于IMU的书写助手解决方案。通过将IMU粘贴到普通笔上,能够高精度地捕捉笔尖在任意平面内的自由、连续书写。具体而言,我们提出了“基于刚体结构的运动关联”解决思路,将笔和IMU作为一个整体,从而基于其刚体结构的拓扑关系,根据IMU的位姿变化推导笔尖的三维轨迹;进而提出了“基于主成分分析的书写平面检测”和“基于高度变化的轨迹片段识别”来去除连续书写过程中由提笔动作导致的额外轨迹,而仅保留有效书写。由此,我们实现了任意平面内、自由连续书写轨迹的毫米级重建,提供了“你在写、我在记”的泛在交互模式。相应成果在CCF-A类期刊ACM IMWUT/Ubicomp上发表。
部分合作工作:
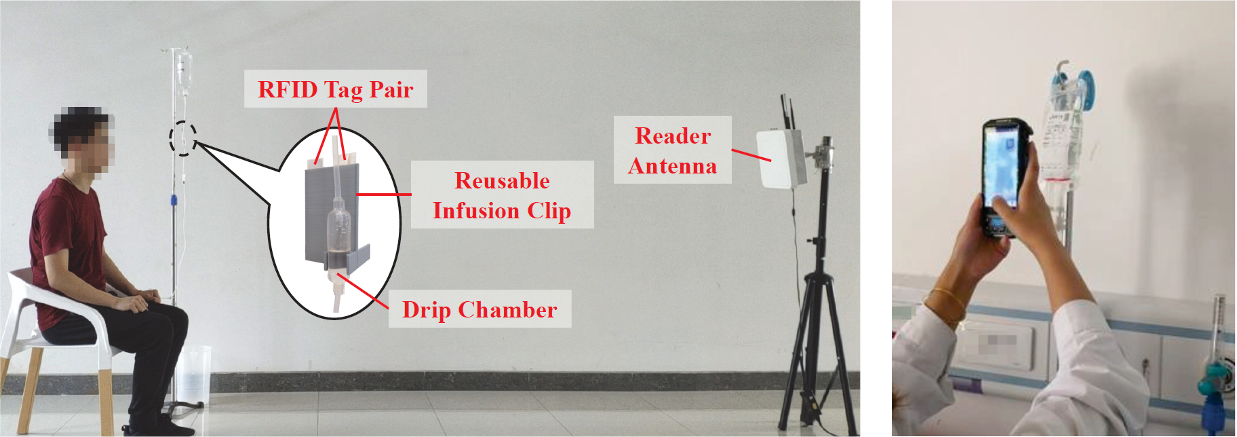
DripMonitor: 基于RFID的输液滴速监测系统(Ubicomp'21)
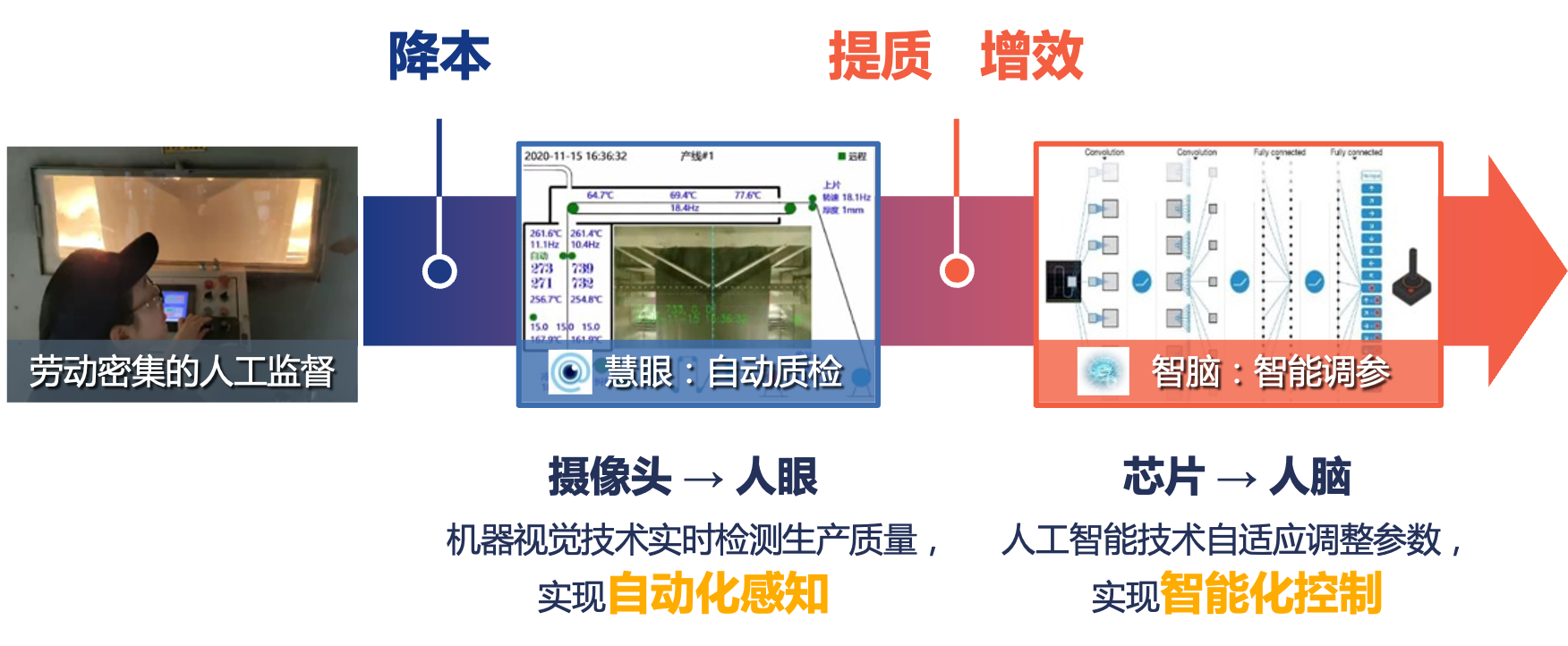
面向工业互联网的精准智能制造:基于计算机视觉的高精度实时纠偏系统(IPSN'22)
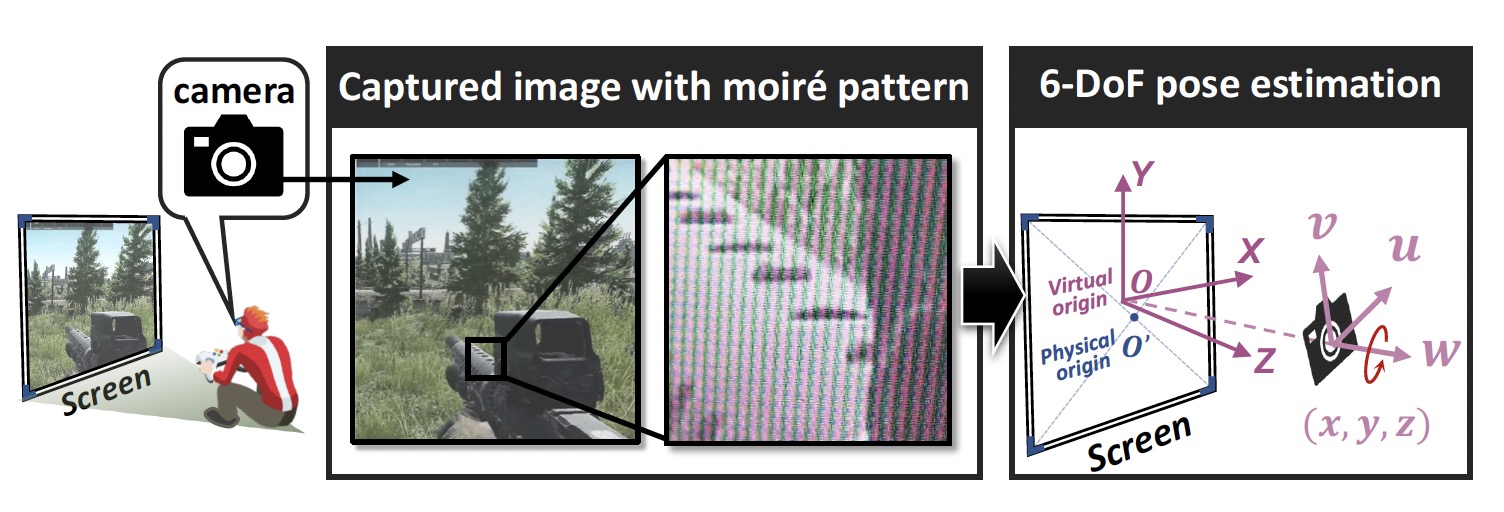
MoirePose: 基于摩尔纹的超高精度摄像头六自由度位姿估计(MobiCom'22)
