
扫描手机二维码
开通时间:..
最后更新时间:..

 赞
赞
的个人主页 http://faculty.nuaa.edu.cn/wenhao/zh_CN/index.htm

航天结构在轨组装和重构动力学与控制
Dynamics and Control of Autonomous Assembly of a Space Structure on Orbit

图1 固定基座机械臂进行结构模块组装的物理仿真实验过程
Figure 1 Autonomous assembly of structural modules using fixed-base robot

图2 两个航天器进行自主交会、对接的物理仿真实验过程
Figure 2 Experimental research on RVD mission of two spacecraft simulators

图3 飞行双臂机器人地面模块预组装调整及装配实验过程
Figure 3 Ground experiment process of flight dual-arm robot module pre-assembly, adjustment, and assembly
空间爬行机器人动力学与控制
Dynamics and Control of Space Climbing Robots

图4 两足空间爬行机器人在桁架上移动的仿真过程
Figure 4 Simulated locomotion of bipedal climbing robot moving on a space truss

图5 两足空间爬行机器人在桁架上移动的地面实验过程
Figure 5 Ground experiment process of bipedal climbing robot moving on a space truss
绳系卫星系统的动力学与控制
Dynamics and Control of Tethered Satellite Systems
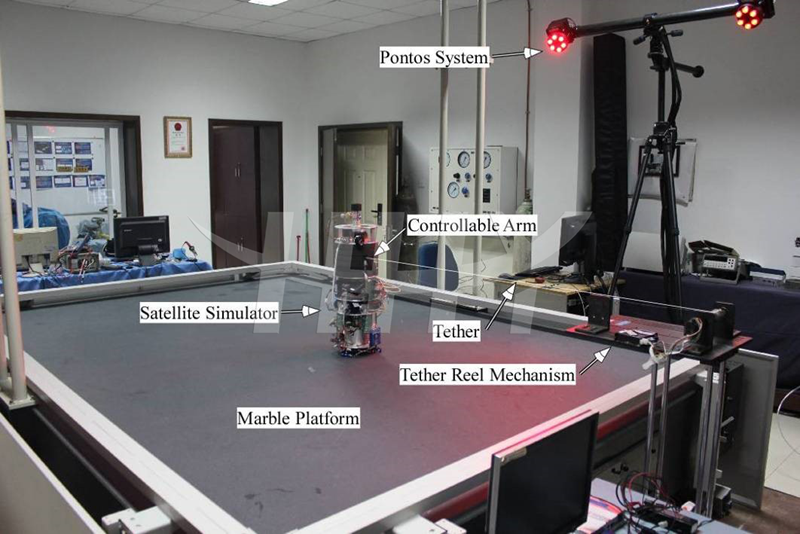
图6 绳系航天器地面实验系统
Figure 6 Ground-based experimental system for TSS research
1. Yonglei Zhang, Hao Wen, Haiyan Hu. Distributed output feedback control for vibration suppression of deployable space truss with MFC actuators. Smart Materials and Structures, 2025, 34(7): 075014.
2. 胡海岩, 田强, 文浩, 罗凯, 马小飞. 极大空间结构在轨组装的动力学与控制. 力学进展, 2025, 55(1): 1-29.
3. 黄宏杰, 廖璨, 文浩. 基于零空间饱和及高阶校正的双臂飞行机器人控制. 中国科学: 物理学 力学 天文学, 2025, 55(2): 224510.
4. Caoqun Luo, Ti Chen, Hao Wen, Dongping Jin. Learning-based control for deployment and retrieval of a spinning tethered satellite formation system. Acta Astronautica, 2024, 225: 788-800.
5. Shidong Xu, Ti Chen, Hao Wen, Dongping Jin. Predefined-Time tracking control of a free-flying space robot on SE(3). IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(5): 5906-5919.
6. Yunhao Hu, Wei Zhang, Hao Wen, Haiyan Hu . On-orbit transportation with non-conserved momenta by cooperative space robots. Advances in Space Research, 2024, 74(10): 5179-5191.
7. Zhengtao Wei, Ti Chen, Hao Wen, Dongping Jin, Haiyan Hu. Autonomous assembly of multiple spacecraft by tether-aided rendezvous and docking: From theory to experiment. Aerospace Science and Technology, 2024, 150: 109187.
8. Zeyu Sheng, Weidong Chen, Zishuo Chen, Hao Wen. Sequence planning for on-orbit robotic assembly based on symbiotic organisms search with diversification strategy. Acta Astronautica, 2024, 219: 941-951.
9. Xiaoliang Zhang, Jialiang Sun, Dongping Jin, Hao Wen. Dongping Jin. Dynamics of reconfiguration and assembly of a stacked satellite system. Acta Astronautica, 2024, 218: 367-382.
10. Xiaolei Ma, Hao Wen. Reinforcement learning-based attitude control for a barbell electric sail. ISA Transactions, 2024, 147: 252-264.
国家自然科学基金青年、面上、重点和重大项目,国家重点研发计划项目、博士学科点基金,中国博士后基金,全国优博专项基金,国家重点实验室自主研究课题,民用航天及载人航天预研项目,与航天院所合作研究项目等
南京航空航天大学 工学 南京航空航天大学航空宇航学院 博士
南京航空航天大学 航空飞行器设计 大学本科毕业 工学学士学位
《Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering》Associate Editor
复杂装备MBSE联盟数字孪生及使能技术委员会副主任委员
